GPS-Dekodierung gelandeter Vaisala SGP-Sonden mit dem Zilog-Decoder
Problem und erste Erfahrungen
Gelandete
SGP-Sonden gelten allgemein als nicht auffindbar nach ihrem GPS-Signal.
Das hat vor allem damit zu tun, dass die GPS-Helix-Antenne der Sonde
nach der Landung nicht mehr korrekt nach oben ausgerichtet ist und
lokale Hindernisse den Himmel teilweise abschatten, was den GPS-Empfang
verschlechert. Darauf scheint das in Sondenjägerkreisen sehr populäre
Programm Sondemonitor besonders allergisch zu reagieren. Ich habe in
der letzten Zeit mit die Signale gelandeter Sonden mit dem
Zilog-Decoder decodiert und sehr positive Erfahrungen gemacht:
Fazit: Die
Lokalisation von gelandeten SGPs ist mit dem Zilog-Decoder meistens problemlos möglich. Wir
haben es mehr mit einem Sondemonitor-Problem zu tun haben und weniger
mit einem SGP-Problem. Sondemonitor ist ein sehr schönes, vor allem
komfortables Programm, und man braucht es auch, aber zum Auffinden der
SGP-Sonden am Boden ist es nicht geeignet:
- Die
Genauigkeit der GPS-Dekodierung der SGPs durch SM ist insgesamt
nicht sehr gut. Das ist schon im Flug erkennbar, aber in 30km Höhe macht eine
Abweichung von ein paar Dutzend Metern nicht so viel aus.
- SM kommt
mit der Situation, dass die Sonde nur wenige Satelliten empfängt, nicht
klar. Es kommt zu zwei Fällen: Entweder zeigt SM eine Position an
(selten), und die Position ist 80-800m neben der Realität. Oder SM
zeigt erst gar keine Position an (oft).
Ich habe ein
paar Experimente gemacht und in letzter Zeit eine
Reihe von SGPs am Boden nur nach ihren GPS-Koordinaten gefunden. Auch
habe ich Sondemonitor-RAW-Dateien einiger früher durch Peilen gefundener Sonden nachträglich dekodiert und deren
Positionen überprüft. In einige Fällen, wo ich die Sonde nicht gefunden
hatte, wusste ich danach, warum ich erfolglos blieb. Bei anderen konnte
ich genauer ergründen, wie man die Qualität des GPS-Signals genauer
analysieren kann, was sich als wichtig herausstellte.
Lösung
Der Zilog-80-Decoder liegt als als Sourcecode auf Github vor. Man muss den
Quellcode komplilieren und kann dann aufgezeichneten Mitschnitte des
Sondensignals decodieren. Als Eingabefile kann man hier entweder
eine mitgeschnittene WAV-Datei aus SDRsharp verwenden, oder man nutzt
eine Rawdatei aus Sondemonitor. Meist versuch ich beides. Die
Ergebnisse werden in einer Textdatei abgelegt. Das Programm wird auf
der Kommandozeile bedient - was nicht allzu komfortabel ist. Um das zu
erleichtern, habe ich die Quellen in Windows kompiliert und füge dem
Paket auch die von mir verwendeten Batch-Dateien bei, die die Bedienung etwas erleichtern.
Wenn ich die Landephase aus z.B. 20km Distanz mitschneide, kann ich
typischerweise die Sonde bis in Baumwipfelhöhe erfassen, was oft bereits
das Auffinden der Sonde im Gelände ermöglicht. Da sind die 80-100m mehr
an Genauigkeit als bei Sondemonitor schon ein Segen. Daher jage ich
solche Daten inzwischen sofort nach der Landung durch den
Zilog-Decoder.
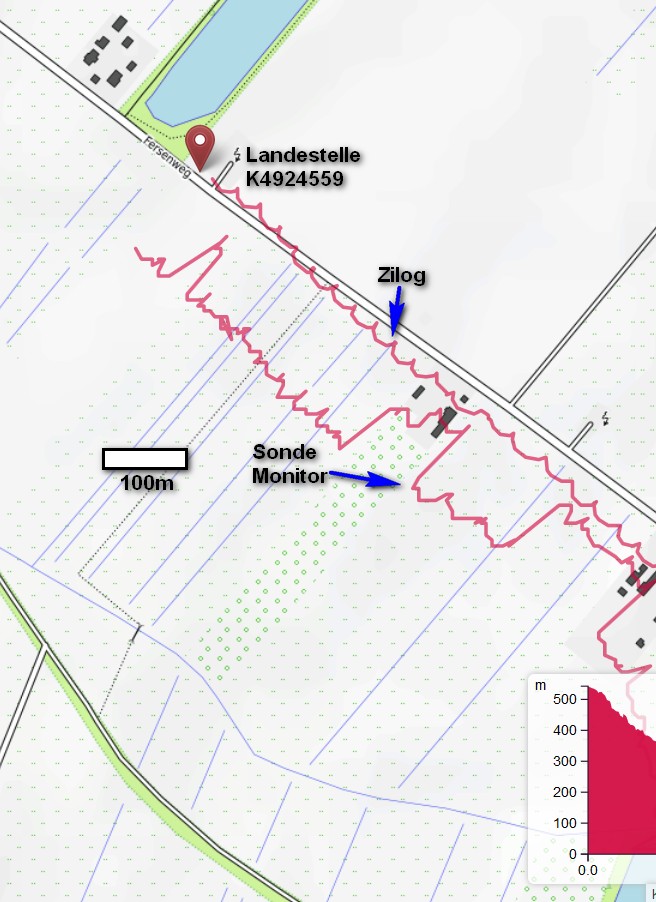
Landeanflug nach Empfang aus ca.
18km Entfernung. Letzte GPS-Höhe 100.5 m, entspricht ca. 60m über
Grund, bei annähernder Windstille am Boden. d= ca. 2.5, DOP= ca. 1.7. Der Marker
zeigt die Auffindeposition der Sonde, die Spuren von Sondemonitor und
Zilog sind dargestellt. Man beachte die Pendelbewegungen der Sonde in der Zilog-Lösung. Kartendaten: © OpenStreetMap-Mitwirkende, SRTM | Kartendarstellung: © OpenTopoMap (CC-BY-SA)
Bei den meisten gelandeten SGPs liefert Zilog verwertbare GPS-Koordinaten. Ein
Vorteil ist auch, dass man die Qualität der Daten recht gut abschätzen
kann und gute und schlechte Ergebnisse relativ einfach unterscheiden
kann.
Erfahrungen
Von meinen letzten 12 SGP-Sonden, die ich am Boden sendend angetroffen
habe, hörten 2 auf zu senden, unmittelbar nachdem ich sie das erste Mal
erfasst habe. In einem Fall konnte ich vorher noch die grobe Richtung
peilen und die Sonden damit finden. Die zweite erforderte ein
großräumiges Absuchen der Landeregion. Eine Sonde konnte ich im Nahfeld
empfangen, sie lieferte aber kein
verwertbares GPS-Signal. Bei einer Sonde war das Ergebnis ungenau, und
ich betrachte den erfolgreichen Fund nach GPS-Daten als etwas
glücklich. Die 8
verbleibenden Sonden lagen
sehr nahe der mit dem Zilog-Decoder ermittelten GPS-Position.
Inzwischen ist es bei einer Suche nach einer sendenden, gelandeten SGP
mein Plan A, das Sonden-GPS zu decodieren. Erst wenn das nicht
funktioniert, wird intensiver gepeilt. Hingewiesen sei auch darauf,
dass Peilen und Mitschneiden des Signals sich ja nicht ausschließen,
zumindest, wenn man mit einem Rechner + RTL-SDR unterwegs ist.
Wie geht es?
Was brauche ich?
1) Folgende Version des Decoders (schon fertig für Windows kompiliert).
Inhalt einfach in ein Verzeichnis entpacken. Es enthält 2 EXE-Dateien
und einige Batch-Dateien. Für andere Betriebssysteme und für aktuellere Versionen sei dringend auf die offiziellen Sourcen des Programmautors verwiesen, die man mit z.B. GCC komplilieren kann.
2) Eine neue (max 2h alte) RINEX-Datei. Die Dateien werden ständig aktualisiert, behalten aber den ganzen Tag über den selben Dateinamen.
Einfach die letzte Datei auf der Liste downloaden und entpacken (z.B. mit 7zip). Diese
Datei kommt auch in das Verzeichnis, in dem sich das Zilog-Programm
befindet. Die Verwendung von Almanach-Dateien ist aus Genauigkeitsgründen nicht empfehlenswert.
3) Als Eingabedatei eine RAWdatei aus Sondemonitor UND/ODER eine
Mitschnitt des Sondensignals als WAV-Datei (z.B. aus SDR#). Die Eingabedatei(en) gehören ebenfalls in das
Zilog-Verzeichnis.
- Erstellung einer WAV-Datei: Zeichne mit SDRsharp eine WAV-Datei auf (baseband auf
OFF) auf. Bei Sonden am Boden sollten es schon mindestens 2-3 Minuten
sein. Man kann ja, während man in der Gegend herumpeilt, einfach eine
Aufzeichnung starten.
-
Sondemonitor-RAW-Datei: : Man kann auch
die RAW-Datei aus Sondemonitor verwenden und in Zilog einlesen, z.B. um
sie mit besserer Genauigkeit zu reanalysieren. Sondemonitor liefert einem auch den Luftdruck, was
zur Abschätzung der Sondenhöhe nutzbringend ist. Auch ist das Programm
mit seiner Darstellung der Sondenbahn in Kartenform extrem
komfortabel. Die RAW-Dateien findet man
im Logverzeichnis von Sondemonitor. Sondemonitor ist natürlich extrem
komfortabel. Ich verwende daher während eines realen Sondenfluges
Sondemonitor, zeichne in der direkten Landephase meistens auch eine
WAV-Datei auf, und reanalysiere die Daten danach mit Zilog. Der Vorteil
ist eine erheblich bessere Genauigkeit. Gerade wenn man die Sonde bis
knapp über dem Grund verfolgen konnte, reicht das oft schon zum
Auffinden im Gelände.
Anwendung:
In meiner Windoof-Version befinden sich Batch-Dateien (*.bat) für
verschiedene Einsätze:
decode_RAW.bat
decode_WAV.bat
für RAW - bzw. WAV-Dateien. Beide Dateien eignen sich für eine 3D-Decodierung von fliegenden oder gelandeten Sonden
Für hartnäckige Fälle (wenn die gelandete Sonde nur noch 3 Satelliten
sieht), gibt es 2 weitere Versionen, die weiter unten erläutert werden:
decode_2D_RAW_boden.bat
decode_2D_WAV_boden.bat
.
Die Batch-Dateien kann man wie ein Programm ausführen. Man
muss aber vorher mit einem Editor die letzte Zeile
ändern:
Bei der WAV-Version lautet die Zeile z.B. so:
rs92gps --crc -g2 -v -e brdc0650.17n input_landung.wav > output_wav_Landung.txt
Man muss folgendes ändern:
- den Filenamen der gewünschten WAV-Datei (oder RAW-Datei) anpassen (in
dem Beispiel "input_landung.wav" durch den Filenamen der eigenen Datei
ersetzen).
- den Filenamen der RINEX-Datei anpassen (in dem Beispiel "brdc0650.17n" durch den Filenamen der aktuellen Rinexdatei ersetzen).
- den Filenamen der gewünschten Output-Datei anpassen (in dem Beispiel
"output_wav_Landung.txt" durch den gewünschten Namen des Ausgabefiles
ersetzen).
Nicht vergessen, die Batchdatei aus dem Editor zu speichern.
Die ganzen Zeilen vor der entscheidenden Zeile, die mit REM beginnen,
sind Kommentare. Die letzte REM-Kommentarzeile ist eine funktionierende
Version des Befehls. Wenn man also etwas kaputteditiert, gibt es hier
Ersatz.
Dann die Batchdatei wie ein Programm ausführen. Das Ergebnis ist eine
Textdatei (im Beispiel "output_wav_Landung.txt"), die man mit dem
Lister oder Editor angucken kann.
Diese Liste enthält natürlich die gewünschten
Koordinaten. Die kann man auf verschiedene Weise weiterverarbeiten:
- Bei einer Sondenjagd vor Ort guck ich mir die Ergebnisse einfach
mit einem Editor an, suche die genauesten Ergebnisse heraus und tippe
sie in mein Handy-Navi ein.
- Für die
Vorbereitung einer Sondenjagd zuhause lade ich die Dateien meistens
Excel, beseitige überflüssige Spalten, speicher das Resultat als
CSV-Datei. Diese kann man wieder im Editor laden und z.B. auf die Seite
GPS-Visualizer pasten, um eine
GPX-Datei zu
erzeugen, die man wiederum in Google Earth oder Open-Topomap darstellen zu
können.
Hinweise für die Versionen für die Dekodierung im Flug und am Boden
Die Ausgabedaten
Die Versionen für die Dekodierung im Flug geben einem eine Liste der
Positionen, die zusätzlich eine Einschätzung der GPS-Genauigkeit
erlaubt. Eine Zeile sieht so aus:
[23841]
(M2243313) (2017-03-17) Fr 05:07:19.480 lat: 53.76645 lon:
10.00144 alt: 77.6 (d:1.2) DOP[9,6,3,23,17,31,19] 3.1
[Framenr][Sondenkennung] Datum (YYYY-MM-DD) <Wochentag Uhrzeit>
lat:<Breite in Grad> lon: <Länge in Grad> alt: <GPS-Höhe
in Metern> <d-Wert> DOP[Satellitennummern] <DOP-Wert>
Frames sendet die Sonde alle Sekunde, Framenr ist also die Zeit in Sekunden nach Einschalten der Sonde. Datum, Uhrzeit (UT), lat, lon sind selbsterklärend
Zur GPS-Höhe (alt) ist zu
sagen, dass es sich hierbei um eine Höhe über dem WGS84 Ellipsoid
handelt und NICHT über Höhen über Meereshöhe. Um letztere zu erhalten,
muss man im Hamburger Raum 40m Geoidhöhe abziehen.
Hier und hier gibt Online-Rechner, die einem die Geodhöhe für den eigenen Standort liefern.
Abschätzung der Genauigkeit der Ergebnisse
Für
das Aufsuchen am Boden muss man bedenken, dass die Zahl der
erfassten Satelliten durch die ungünstige Ausrichtung der Helixantenne
und Abdeckung des Himmels durch Hindernisse (z.B. dem Baum, in dem die
Sonde hängt; die Sonde hat eine nach heutigen Maßstäben schlechte
Empfangsleistung) begrenzt ist. Der Zilog-Decoder kommt damit aber oft
erstaunlich gut klar. Wichtig ist, dass man das Sondensignal ein paar
Minuten lang aufzeichnet, denn mit der Zeit ändert sich die
Satellitengeometrie, die die Sonde nutzt. Nicht nur de
Satellitengeometrie, sondern auch die generelle Genauigkeit der
GPS-Dekodierung schwankt mit der Zeit. Es
wechseln Phasen, bei denen eine gute GPS-Lösung herauskommmt und
solche, in denen es nicht so gut oder gar nicht funktioniert. Daher ist
es sehr wichtig, dass man die Qualität der Daten sorgfältig analysiert,
um die guten Lösungen als solche zu erkennen. Dazu bietet der
Zilog-Decoder folgende Daten:
Der d-Wert ist ein generelles
Maß, wie gut die Lösung generell konvergiert - unabhängig von der
Satellitengeometrie.Guten Lösung haben nach meiner Erfahrung
d-Werte << 10, meist auch < 5 und oft sogar unter 1. Bei
einem Wert zwischen 10 und 30 muss man schon mit einem ziemlichen
Fehler der Position rechnen. Fazit: Gute Lösungen haben einen kleinen d-Wert.
Bei DOP findet man zwei weitere
Angaben, die die Einschätzung der erzielten Genauigkeit ermöglichen -
sehr wichtig bei gelandeten Sonden.
- Die zur Lösung herangezogenen Satelliten
werden in eckigen Klammern aufgelistet. Hier sind bei fliegenden Sonden
10-12 typisch, bei gelandeten deutlich weniger. 4 sind das absolute
Minimum. Fazit: Je mehr Satelliten, umso besser ist die Lösung.
- der DOP-Wert selbst, der ein Maß für die Qualität der Satellitengeometrie ist. Faustregel: Je niedriger der Wert, um so besser. Fliegende Sonden haben hier oft einen Wert von 1 bis 2, gelandete sehr viel schlechter.
Es gilt:
< 1: Ideal (nie erlebt)
1-2: Sehr gut. Typisch für fliegende Sonden. Bei gelandeten Sonden fast ein sicheres Zeichen für eine Baumlandung....
2-5: Immer noch richtig gut.
Sonde wird man in der Regel unmittelbar am angegebenen Ort vorfinden.
Vielleicht ist Dein Handy-GPS ungenauer.
5-10: Mittelgut. Meist ist die Sonde erstaunlich nahe an der Position, aber kann z.B. auch 20m daneben liegen
10-20: nicht sehr verlässlich: Sonde auf freiem Feld vielleicht noch findbar.
>20: Schlecht. Vielleicht hingehen und dann peilen?
Bei schlechtem DOP-Wert lohnt es sich oft, die Aufzeichnung zu
verlängern, denn oft ändern sich die Satellitengeometrien im Laufe der
Zeit. Habe ich eine DOP=8-Lösung, geh ich da hin, und wenn es nicht
reicht, wird die Aufzeichnung verlängert. In den meisten Fällen findet
man die Sonde aber im unmittelbaren Umfeld der ermittelten Position.
Man hat aus einer 5-Minuten-Aufzeichnung viele solcher Werten, und man kann sich die mit den meisten Satelliten, dem kleinsten d-Wert und dem geringsten DOP aussuchen.
Manchmal ist das DOP durchgehend ähnlich, oder es wechseln Phasen ohne
Lösung mit solchen mit gutem GPS-Lösungen ab. Nach meiner
Erfahrung ist auch das Produkt von d-Wert und DOP-Wert ein gutes Maß
für die zu erwartende Genauigkeit. Im
folgenden Beispiel wurde eine am Boden liegende Sonde für mehr als eine
Stunde mit einem RTL-SDR empfangen und durch Peilen gefunden. Ich hatte
aber einen großen Sondemonitor Rawfile, und dieser wurde mit Zilog
decodiert. Die Helixantenne der SGPL horizontal lag auf einer
Rasenfläche, und es gab Himmelsabdeckung durch Büsche, Bäume,
Gartenmöbel und ein Haus. Im Datensatz fanden sich Werte mit DOP=52 und
solche mit DOP=2.5, und etliche bei DOP=3.4 bis 3.7. Die Werte wurden
nach dem Produkt von d*DOP sortiert, und einige Subsets dieser Daten
werden hier dargestellt:

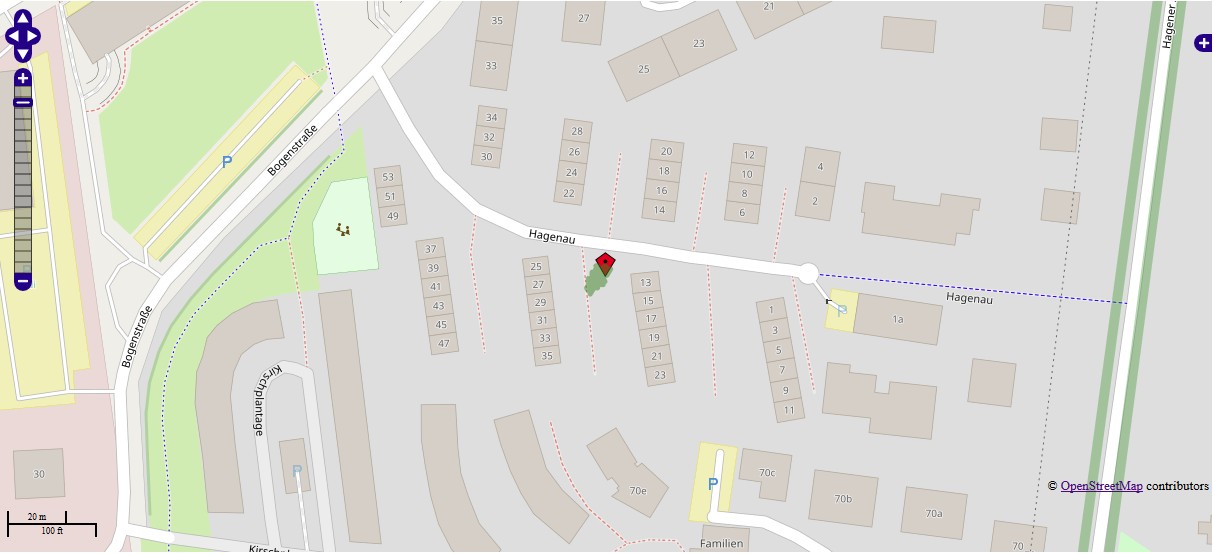
GPS-Positionen einer gelandeten
Radiosonde. Dekodiert mit Zilog aus einem Sondemonitor Rawfile. Nur
Werte, bei denen das Produkt d-Wert*DOP < 8 war, wurden dargestellt,
als Beispiel für eine sehr gute Qualität der ausgewählten Daten. Die
Sonde befand sich beim Marker (unterer Eckpunkt des Vierecks).
Sondemonitor zeigte eine um 800m falsche Position. Kartengrundlage © OpenStreetMap contributors.
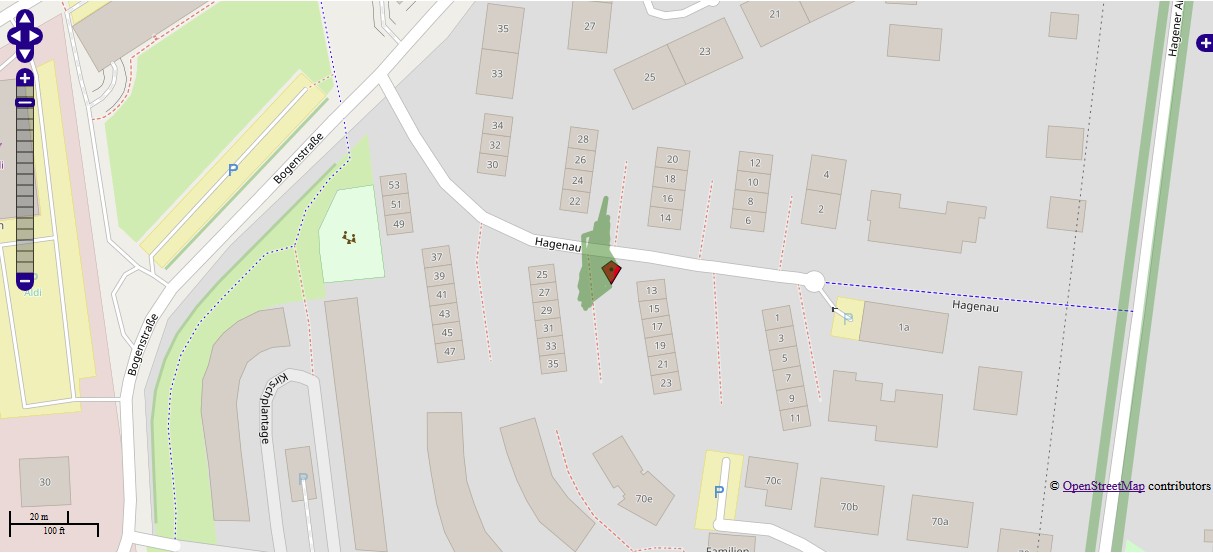
Wie oben, aber es werden nur
Positionen dargestellt, bei denen das Produkt (d-Wert* dop) zwische 20
und 100 lag, als Beispiel für eine mittelmäßige Qualität der Daten. Kartengrundlage © OpenStreetMap contributors.
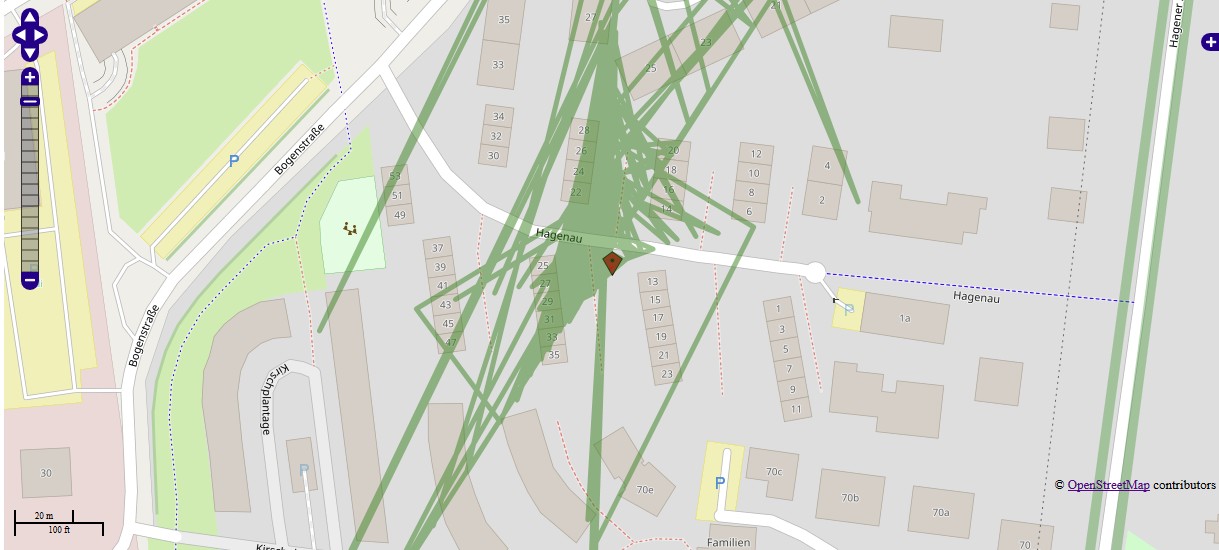
Wie
oben, aber es werden nur Positionen dargestellt, bei denen das Produkt
(d-Wert* dop) über 100 lag - dies sind die schlechtesten Positionen der
Serie. Kartengrundlage © OpenStreetMap contributors
Bei einer
echten Sondenjagd hat man natürlich nicht die Zeit zu einer
elaborierten statistischen Analyse. Aber das Beispiel illustriert,
worauf es ankommt: Man kann einen Datensatz sehr schnell durchgucken
und sehr leicht erkennen, welche Werte die besten im Set sind: Es sind
die, bei dem ein geringer DOP Wert, ein geringer d-Wert und eine hohe
Zahl von Satelliten zusammenfallen. Derartige ausgewählte gute
Koordinaten kann man nun in ein GPS-Handgerät oder in
sein Handy eingeben. Sehr praktisch ist eine App, die z.B. die
Open-Streetmap offline darstellt, dann ist man auch im Funkloch
handlungsfähig, wie z.B. Locus.
2D-NAV: Wenn nix mehr hilft
Für harte Fälle gibt es noch die 2D-Nav-Version des Decoders. Die hilft
in Fällen, wo die Sonde nur 3 Satelliten erfasst (die anderen Tools
brauchen 4 Satelliten). Es muss klar sein, dass die Genauigkeit hier
kritisch ist. Bei Tests am Boden konnte ich diesen Fall kreiieren, bei
allen meinen Sondenjagden unter realen Bedingungen hatte ich bisher,
wenn überhaupt, immer gleich eine 3D-NAV-Lösung. Der 2D-Decoder liefert
aber auch automatisch eine 3D-Lösung, wenn diese möglich ist.
Hat man beim 2D-Decoder nur eine 2D-Lösung, erhält man eine
manchmal eine deutlich bessere oder sogar richtig gute Genauigkeit,
wenn man die reale GPS-Höhe der Sonde kennt und dem Decoder vorgibt.
Hier kann man auch den Drucksensor der Sonde nutzen (z.B. im Vergleich
eines Drucks auf Meereshöhe aus dem Netz oder im Vergleich zum
Handy-Druckmesser; Geoidhöhe draufaddieren nicht vergessen). Schätzt an
die GPS-Höhe der Sonde auf 83m, würde man die Option "--2dalt 83"
zusätzlich in die Zeile einsetzen.
Erfahrungen
Ich schätze, dass man ca. 75% der gelandeten SGP-Sonden mit dem Verfahren auffinden kann.
Bei einigen Sonden, die ich durch früher durch Peilen lokalisiert
hatte, konnte ich die Position nach den Sondemonitor-Rawfiles
bestätigen.
Zilog-Decoding ist vor allem für Leute, die mit RTL-SDR und Laptop
durch die Gegend laufen, sehr angenehm: Mit etwas Übung hat man
einen Fix innerhalb von Minuten. Nach erfolgter Lokalisation
mit offensichtlich guter Genauigkeit verschwinden Rechner und Antenne
im Rucksack, und das GPS-Handgerät
oder das Handy führt einen zur Sonde!
H. Lüthen (astrohardy.de) Juni 2017